
Sumo/soccer robot

Why did I make them?
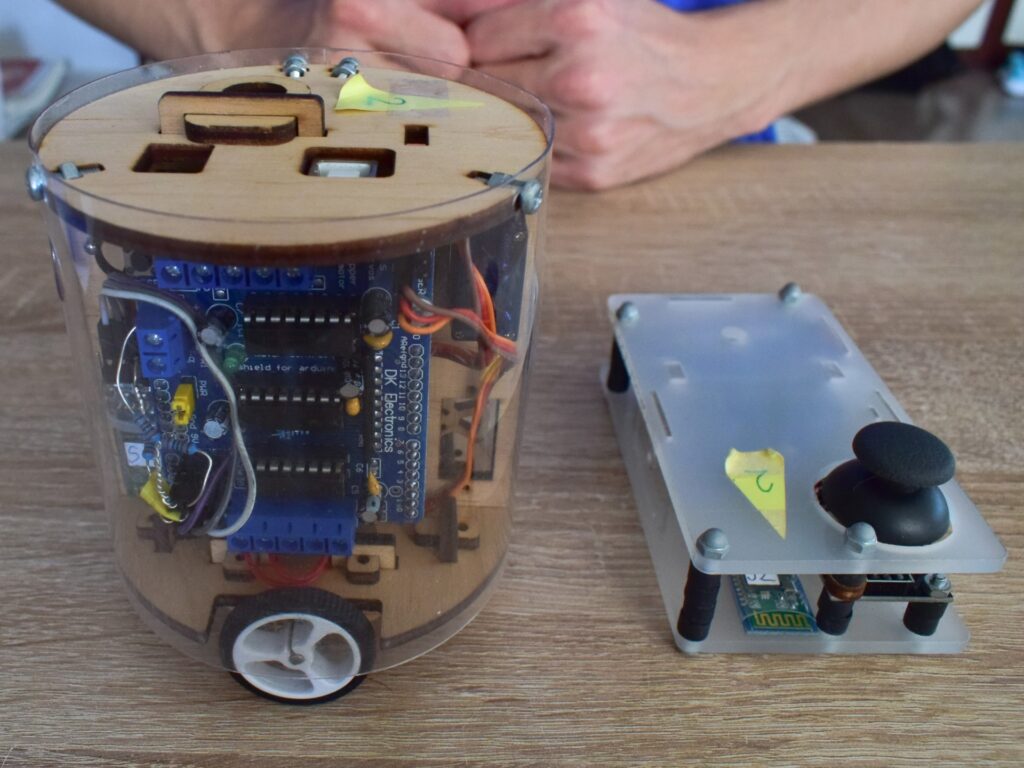
I made the robots shown above for an exhibition to increase the amount of presented interactive devices. The robot is a wheeled cylinder controlled by its own remote control, which can be used to play two types of games:
- Robot sumo: The robots have to push each other out of a drawn circle.
- Robot soccer: The robots have to push a sponge ball into the opponent’s goal.
Each robot can be moved with its own remote control, which consists of a joysick and a built-in push button. By pressing the button, our robot pulls out its hatchet, with which it delivers a devastating blow to the opponent or kick the ball into the opponent’s goal.

Why does it look like this?
The design and component selection were inspired by the following purposes:
- the robots should be able to push each other
- they should be interactive
- they should last a few hours of continuous use on a single charge -> small motor, large battery
- the battery should be easy to replace
- although they will fight, they shouldn’t take much damage – that’s why they are cylindrical
- if they are damaged, their repair should be very easy
- they could be used so easily that even a 6-8 year old can understand them
- no need for long range, but it should be more resilient to radio noise -> bluetooth
- be very cheap and easy to manufacture
- should be ready quickly
The robot achieved all of the above goals. For easy replacement of parts, the structural elements are held together in several places by wedge joints, which do not come loose from shaking or pushing, but can be picked out/squeezed in by hand. Thus, for battery replacement, the cylindrical shell can be removed and put back in seconds.
The robot’s weakest point was the battle axe: The SG-90 servo motors occasionally burned out due to frequent pulling and straining during fights – of course, these can also be replaced in minutes.

A small extra
There is a hidden technical feature: I wrote the program for the remote controls in such a way that, if necessary, all remote controls can be paired with any of the robots. Repairing can be done without any other equipment than just the joystick. A flashing LED provides information about the current pairing.
Summary
The device proved to be a good stress-relieving attraction in the concentration-demanding whirlwind of exhibitions/expos. It entertained visitors regardless of age or technical knowledge.
By the way, there is an official robot sumo championship regardless of my contraption. It is a Japan-based, international competition for makers with strict rules, in which autonomous robots fight each other in a ring, with the goal of knocking out or neutralizing their opponent as quickly as possible. To achieve this, these robots are flat, strong and fast. One round usually barely lasts a few seconds, because that’s enough for the competitor to get into a good position and raise up its opponent, then push it out of the ring.
https://www.youtube.com/watch?v=QCqxOzKNFks&ab_channel=RobertMcGregor